
NASA rover dva dana se vozao po Marsu bez ljudske kontrole
U decembru NASA je napravila još jedan mali korak ka autonomnim roverima za površinu.
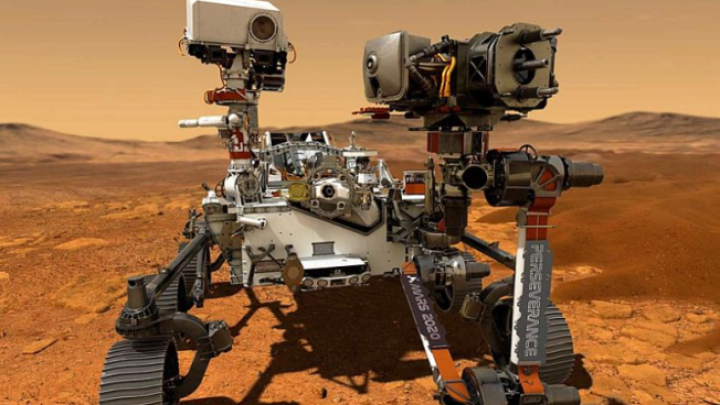
U jednoj demonstraciji, tim Perseverance-a je koristio veštačku inteligenciju da generiše tačke puta za rover.
Perseverance je koristio AI tačke puta tokom dva odvojena dana, putujući ukupno 456 metara bez ljudske kontrole.
"Ova demonstracija pokazuje koliko su naše sposobnosti napredovale i proširuje način na koji ćemo istraživati druge svetove.
Autonomne tehnologije poput ove mogu pomoći misijama da rade efikasnije, odgovore na izazovan teren i povećaju naučni učinak kako se udaljenost od Zemlje povećava.
To je snažan primer timova koji pažljivo i odgovorno primenjuju novu tehnologiju u stvarnim operacijama", rekao je administrator NASA-e Džared Ajzakman.
Mars je veoma daleko, i postoji oko 25 minuta kašnjenja za dvosmerni signal između Zemlje i Marsa. To znači da su, na ovaj ili onaj način, roveri prepušteni sami sebi na kratke periode vremena.
To kašnjenje oblikuje proces planiranja rute. Vozači rovera ovde na Zemlji ispituju slike i podatke o nadmorskoj visini i programiraju niz tačaka puta, koje obično ne prelaze 100 metara između.
Plan vožnje se šalje NASA-inom Mrežom za duboki svemir (DSN), koja ga prenosi jednom od nekoliko orbitera, koji ga zatim prosleđuju Perseverance-u, piše ScienceAlert.
U ovoj demonstraciji, AI je analizirao orbitalne slike sa HiRISE kamere na orbiteru Mars Reconnaissance Orbiter, kao i digitalne modele visine terena.
AI, koji je zasnovan na Claude AI kompanije Anthropic, identifikovao je opasnosti kao što su peščane zamke, polja kamenja, stena i stenovite formacije.
Zatim je generisao put definisan nizom tačaka koje izbegavaju te opasnosti.
Od tog trenutka, Perseverance-ov sistem za auto-navigaciju je preuzeo. Ima više autonomije od svojih prethodnika i može da obrađuje slike i planove vožnje dok je u pokretu.
Postojao je još jedan važan korak pre nego što su te tačke puta prenete Perseverance-u. NASA-in Laboratorija za mlazni pogon (JPL) ima "blizanca" za Perseverance nazvanog "Test vozilo sistema" (VSTB) u JPL-ovom Mars dvorištu.
To je inženjerski model s kojim tim može da radi ovde na Zemlji kako bi rešavao probleme ili za situacije poput ove. Ove inženjerske verzije su uobičajene u Mars misijama, a JPL ima jednu i za Curiosity.
"Osnovni elementi generativne veštačke inteligencije pokazuju mnogo potencijala u pojednostavljivanju stubova autonomne navigacije za vanplanetarnu vožnju: percepcija (viđenje stena i neravnina), lokalizacija (znanje gde se nalazimo), i planiranje i kontrola (odlučivanje i izvršavanje najsigurnijeg puta).
Krećemo se ka danu kada će generativna veštačka inteligencija i drugi pametni alati pomagati našim roverima da savladaju vožnje duge više kilometara uz minimalno opterećenje operatora i da označe zanimljive površinske karakteristike za naš naučni tim pregledom ogromne količine slika rovera", rekla je Vandi Verma, članica tima za inženjering Perseverance-a.
Veštačka inteligencija brzo postaje sveprisutna u našim životima, pojavljujući se na mestima koja ne moraju nužno imati snažnu potrebu za njom.
NASA razvija automatske sisteme navigacije već neko vreme, iz nužde. U stvari, Perseverance-ovo primarno sredstvo za vožnju je njegov autonomni sistem za samostalnu vožnju.
Jedna stvar koja sprečava potpuno autonomnu vožnju jeste način na koji neizvesnost raste kako rover funkcioniše bez ljudske pomoći.
Što duže rover putuje, to postaje nesigurniji u vezi sa svojom pozicijom na površini.
Rešenje je da se rover ponovo lokalizuje na svojoj mapi. Trenutno to rade ljudi. Ali to zahteva vreme, uključujući kompletan komunikacioni ciklus između Zemlje i Marsa. To ograničava koliko daleko Perseverance može da ide bez pomoći.
NASA/JPL takođe rade na načinu da Perseverance koristi AI da se ponovo lokalizuje. Glavna prepreka je usklađivanje orbitalnih slika sa slikama sa tla koje pravi rover.
Čini se vrlo verovatnim da će AI biti obučen da u tome postane izuzetan.
Očigledno je da AI treba da igra mnogo veću ulogu u istraživanju planeta. Sledeći Mars rover bi mogao biti veoma drugačiji od sadašnjih, sa naprednijom autonomnom navigacijom i drugim AI karakteristikama.
Već postoje koncepti za rojeve letećih dronova koje bi rover ispuštao kako bi proširio svoj istraživački domet na Marsu. Ti rojevi bi bili kontrolisani AI-em da rade zajedno i autonomno.
I nije samo istraživanje Marsa ono što će imati koristi od AI-a. NASA-ina misija Dragonfly na Saturnovom mesecu Titanu koristiće veštačku inteligenciju u velikoj meri. Ne samo za autonomnu navigaciju dok letelica leti, već i za autonomno sortiranje podataka.
"Zamislite inteligentne sisteme ne samo na Zemlji, već i u edge aplikacijama u našim roverima, helikopterima, dronovima i drugim površinskim elementima, trenirane kolektivnom mudrošću NASA-inih inženjera, naučnika i astronauta.
To je tehnologija koja menja igru i koja nam je potrebna da uspostavimo infrastrukturu i sisteme potrebne za stalno ljudsko prisustvo na Mesecu i da odvedemo SAD na Mars i dalje", rekao je Met Volas, menadžer JPL-ove Kancelarije za istraživačke sisteme.
Izvor. 021