nove tehnologije
INEA SR
Industrija 59 / decembar 2015.
39
liste kojom zapravo određujemo ravninu prepoznavanja kamere i
tako poravnavamo taj koordinatni sistem sa referentnom tačkom na
robotu, pri čemu uzimamo u obzir i smer oba koordinatna sistema
kao i koordinatni sistem robota.
Po završenoj kalibraciji na kameri postavljamo režime traženja i
analize komada, pri čemu možemo dodeliti različite nazive algori-
tmima za različite proizvode, te ih pozivamo i biramo pojedinačno
s programom koji se izvodi na robotu. Zbog promena osvetljenja,
ukoliko nemamo mogućnost da zatamnimo ćeliju, možemo pozi-
vati različite algoritme za prepoznavanje istih komada u različitim
smenama pri promenjenim uslovima osvetljenja na samoj kameri.
Cognex nudi i posebno osvetljenje koje kamera sama aktivira pri sli-
kanju, te nam tako daje istaknute geometrijske detalje tela. Podatke
koje s kamere želimo poslati na robota, biramo u posebnoj kartici
»Communications« gde možemo odabrati Mitsubishijeve robote i
možemo birati šta sve želimo imati na robotu i po potrebi na ope-
raterskom panelu GOT. Kada imamo pripremljene algoritme za pre-
poznavanje, kamera je gotovo spremna za korišćenje. Kamera u tzv.
online režimu rada
čeka naredbu za ak-
tivaciju koja je već
integrisana u sam pro-
gramski jezik Melfa
Basic V.
Brzina kojom kamera
po aktivaciji vraća
vrednost robotu, pr-
venstveno zavisi od
količine
korišćenog
alata i vremena sni-
manja slike. Pre sni-
manja slike moramo
u programu robota
inicirati potreban broj
varijabli u koje ćemo
kasnije, pri prikuplja-
nju podataka, spremi-
ti vrednosti dobijene sa kamere. Sve varijable su istog podatkovnog
tipa float, Melfa Basic na taj način omogućuje konverziju među
tipovima podataka. Podaci o položaju komada, ukoliko je kamera
pravilno kalibrirana, predstavljaju odstupanje od koordinatnog
ishodišta kamere i poznate tačke na robotu. Položaj je pohranjen
u varijablu koja predstavlja tačku robota, te se ona kasnije pri hva-
tanju ili manipulaciji jednostavno dodaje tački koju smo utvrdili pri
usklađivanju koordinatnih sistema kamere i robota. U slučaju da
kamera prepoznaje komade na pokretnoj traci, moramo uključiti i
tzv. tracking function, koja je implementirana u Mitsubishi roboti-
ma. Dobra je praksa da aktivaciju kamere kao i obradu podataka,
vršimo u programu koji se izvršava paralelno s glavnim programom.
Tako možemo smanjiti vrieme ciklusa rada robota i preduzeću osi-
gurati povraćaj investicije u automatizaciju procesa u kraćem roku.
Kamera takođe omogućuje slanje snimljenih slika na FTP poslužitelj
za pregled i praćenje kvaliteta proizvoda u stvarnosti. FTP posluži-
telj možemo uključiti i preko operaterskog panela Mitsubishi GOT
te tako prikazati trenutnu sliku s kamere sa svim podacima koje je
kamera poslala robotu. Zaslugom zajedničke Mitsubishi iQ platfor-
me, možemo jednostavno pristupiti unutrašnjim registrima robota i
zaprimljenim podacima preko operaterskog panela GOT, a pomoću
FTP poslužitelja možemo prikazati i sliku tako da dodatna mašinska
oprema nije neophodna.
ZAKLJUČAK
Sistemi mašinskog vida danas omogućuju kompanijama novčano
pristupačna rešenja za kontrolu kvaliteta proizvoda na samoj pro-
izvodnoj liniji u realnom vremenu, te tako omogućuju smanjenje
troškova usled mogućih grešaka u proizvodnji. Treba priznati da
je ponekad brže komade na liniji unapred pripremiti, da bi robot
izvršio manipulaciju istima. Kamere su vrlo osjetljive na uslove
osvetljenja u okruženju, te se upravo zbog toga sistem integratori
odlučuju za zatamnjivanje ćelija ili za različite algoritme prepo-
znavanja u različitim uslovima osvetljenja. Integracija mašinskog
vida s Mitsubishi Electric opremom relativno je jednostavna, te
omogućuje veliki broj dodatnih mogućnosti kao npr. jednostavnu
zamenu programa kamere.
nove tehn logije
Praćenje i upravljanje vaše proizvodnje
nikada nije bilo lakše.
INEA SR d.o.o. /// Karađorđeva 12/217 /// 11300 Smede
blika Srbija ///
+381 26 4615 401 ///
///
Grafički operaterski paneli nove generacije
/// Inea SR d.o.o. /// Karađorđeva 12/217 /// 11300 Smederevo ///
Za više informacija posetite web stranicu
ili na
e p
a 026/4615-401
Slika 4: Odabir podataka koje želimo
primati iz kamere
Slika 6: Programski kod robota u RTToolBox2 za
slanje i preuzimanje podataka iz kamere
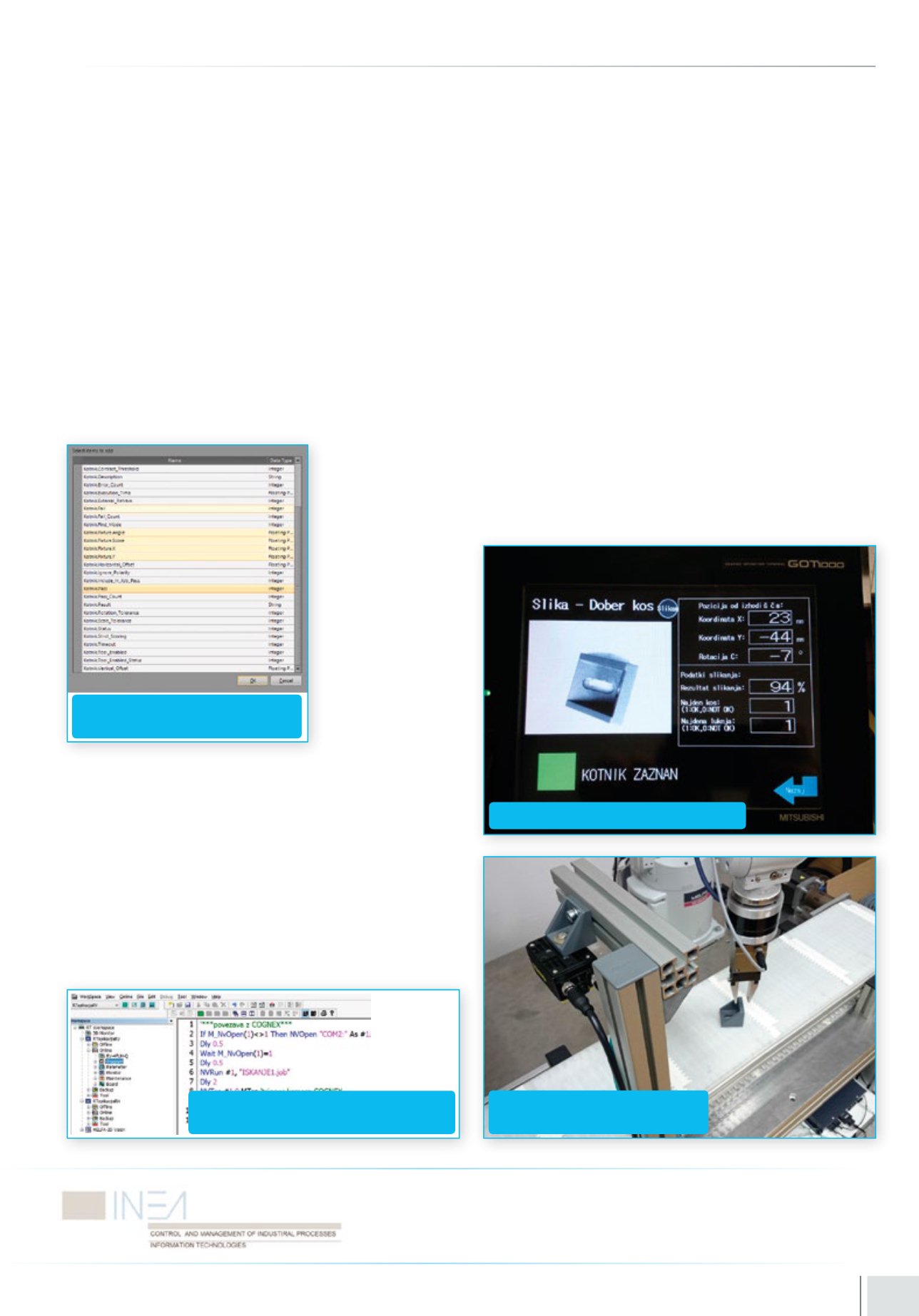
Slika 7: Prikaz podataka na operaterskom panelu
Slika 8: Položaj robotske ruke trenutak
pred podizanje komada


