INTEGRACIJA MAŠINSKOG VIDA
S MITSUBISHI ROBOTIMA
Industrija 59 / decembar 2015.
38
UVOD
Opseg i primenamašinskog vida u industrijskoj automatizaciji i robo-
tici u poslednjih je nekoliko godina u porastu. Projektanti proizvod-
nih linija sve se češće opredeljuju za mašinski vid umesto kajenske
periferne opreme za ponovno pozicioniranje komada, prikupljanje
podataka i nadzor nad kvalitetom proizvodnog procesa. Uz pomoć
mašinskog vida moguće je znatno smanjiti cenu automatizacije u
proizvodnji i povećati fleksibilnost proizvodnih linija, čemu doprino-
si i integracija robotskih sistema u proces.
Algoritmi zaduženi za snimanje i obradu slike postaju sve složeniji i
brži, što je prvenstveno posledica brzog razvoja ugradnih sistema.
Mašinski vid postaje sve jednostavniji za korišćenje upravo zbog
jednostvne i brze implementacije, s obzirom da većina podržava
komunikaciju preko široko rasprostranjene Ethernet mreže. Tako
preduzeća mogu razvijati kompleksne sisteme za nadzor proizvodne
linije, praćenje kvaliteta proizvoda i izmenu komada. Ako u mrežu
dodamo i robote, gotovo da možemo vršiti nadzor cele proizvodne
linije od kuće.
APLIKACIJA
Za prikaz i demonstraciju rada mašinskog vida u ćeliji s robotom,
korišćena je kamera proizvođača Cognex, a kontroler, robot i ope-
raterski panel su Mitsubishijevi. Sva tri uređaja podržavaju sve
popularniju Ethernet komunikaciju. Integracija različitih uređaja
ili sistema u jedan zajednički sistem sa svim funkcijama pojedinih
uređaja često je problematična, pogotovo kada ne možemo za celu
aplikaciju koristiti opremu istog proizvođača. U tom slučaju najčešće
govorimo o kompleksnim sistemima i ako oprema proizvođača nije
međusobno kompatibilna, izođenje aplikacije zahtevaće znatno više
vremena i novca. Zato je trend da se mnogo proizvođača različite
opreme međusobno povezuju. Tako dobijamo veći izbor uređaja
različitih proizvođača koji su međusobno kompatibilni. Isti je slučaj s
partnerstvom između Cognexa i Mitsubishija, gde je osigurana kom-
patibilnost alata i niza funkcija koje podržava pojedini uređaj. Na pri-
mer programski jezik Melfa Basic V, koji se koristi za programiranje
robota, sadrži gotove naredbe za rad s Cognex kamerama pa tako
i kamera osigurava da podaci poslati robotskom kontroleru budu
pravilno interpretirani od strane robota. Kamera takođe podržava
funkciju slanja snimljenih slika na operaterski panel Mitsubishi GOT.
Na taj način dobijamo pregled slika na samoj liniji u realnom vre-
menu i možemo izvršiti korekcije bez većih zastoja proizvodne linije.
Za preuzimanje slike zadužena je kamera Cognex 7402, koja sadrži
svu potrebnu mašinsku opremu za obradu slike i slanje podataka u
mrežu ostalim uređajima. Kamera prima sliku rezolucije 1280x1024,
sa do 102 slike u sekundi. Brzina snimanja slike zavisi od vremena
snimanja slike i podržana je naprednim algoritmom PatMax, koji
znatno pojednostavljuje traženje i analizu komada.
Robot RV-4FLM-Q i robotski kontroler CR750-Q rade na
Mitsubishijevoj iQ, platformi koja na jednommestu objedinjuje PLC-
e, servo pojačala, robote i robotske kontrolere, kao i ostale module
u Mitsubishijevoj ponudi - čime je zaokružena celina za industrijsku
automatizaciju.
Osnovna povezanost sistema vrlo je jednostavna, potrebno nam je
24V napajanje za kameru i mrežni razdelnik. Na razdelnik priključu-
jemo robotski kontroler, kameru i operaterski panel Mitsubishi GOT
na kojemprikazujemo slike s kamere. Na sve uređaje se povezujemo
preko posebnog računara. Pri povezivanju je potrebno paziti da su
IP adrese postavljene tako da su svi uređaji u istoj mreži i mogu me-
đusobno komunicirati.
Za implementaciju algoritama na kameri koristimo lako dostupno
programsko okruženje In-Sight Explorer, a za programiranje robota
koristimo programski paket Mitsubishi RT ToolBox2.
Prvo što treba učiniti je uspostaviti vezu između robota i kamere.
Pri tome nam pomažu već pripremljeni parametri robota u koje
unosimo IP adresu kamere, koju određujemo sami, te broj komu-
nikacijskog kanala. Zatim moramo definisati koordinatni sistem
kamere kao i njegov položaj. Za robota je najvažniji položaj kame-
re u prostoru, s obzirom na bazni koordinatni sistem robota, tako
znamo gde se kamera nalazi,
a s položaja kamere preko
kalibracije kamere izračuna-
vamo tačke u vidnom polju
kamere koje nas zanimaju,
pa ih pohranjujemo kao
pozicijske varijable u robo-
tu. U protivnom su podaci
dobijeni iz kamere relativno
neupotrebljivi.
Kalibraciju
kamere vršimo tako da ka-
meri odredimo koordinatni
sistem pomoću kalibracijske
≡
Članak pripremio Inea SR Team.
nove tehnologije
INEA SR
ove tehnologije
Slika 1: Slika aplikacije
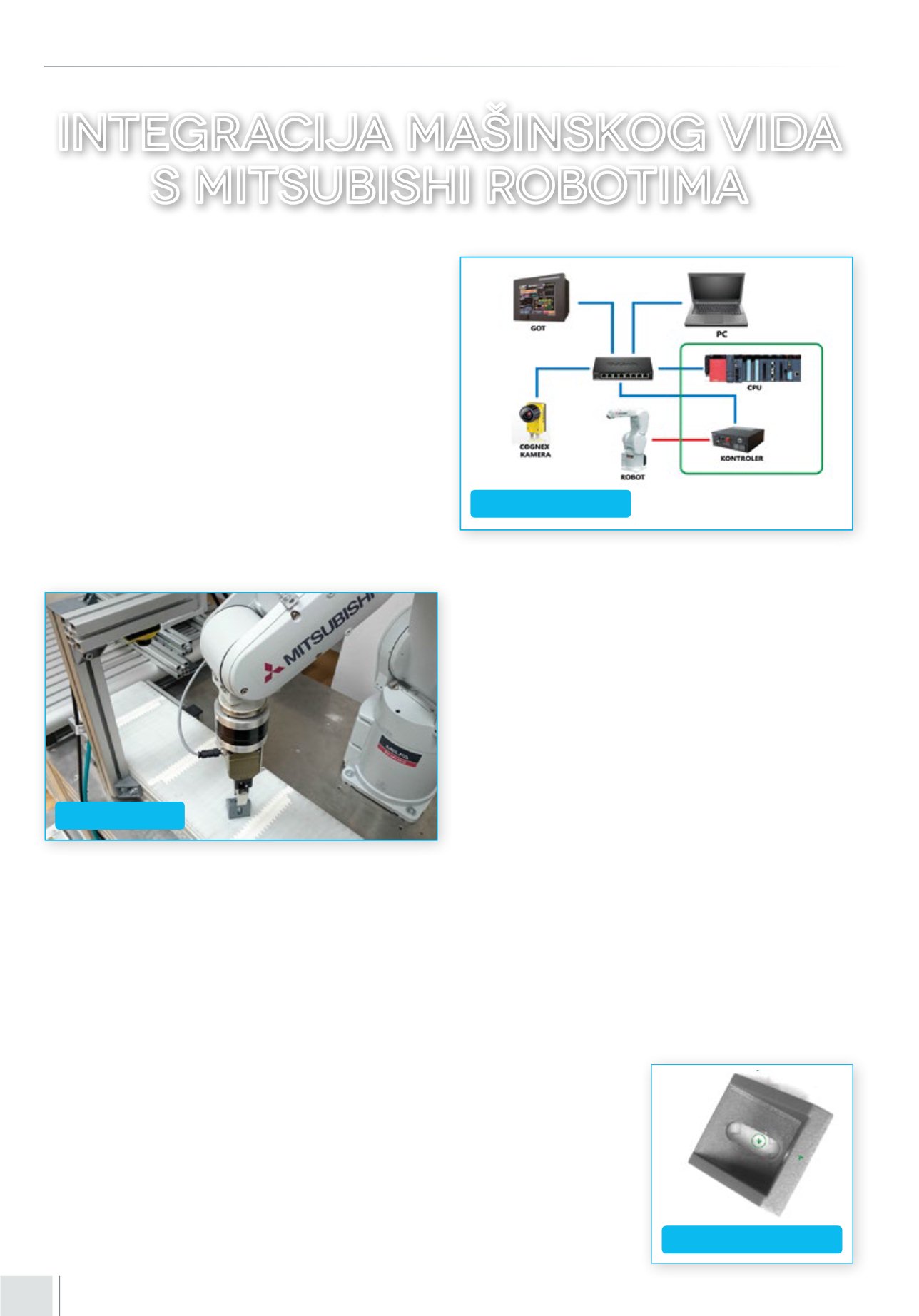
Slika 2: Shema komunikacije
Slika 3: Primer uslikanog komada


